

步进电机加减速的S曲线控制心得
摘 要:为了满足柔性加工的要求,在控制电机运行时要保证电机在加减速时保持输出力矩的连续,这里我采用了S曲线的方法来控制步进电机加减速,使电机保证加速度的连续,从而保证输出力矩的连续。
1 概述
电机的加减速控制是数控系统的重要组成部分,也是其关键技术之一。快速准确的定位更是加减速控制的重中之重,要实现这一目标就需要保证电机在不失步的情况下启动和停止,并以最快的速度达到指定位置。目前常见的加减速曲线有:梯形曲线、S型曲线和指数曲线等。由步进电机的特性可知,S型曲线控制更适用于实际应用。
2 S型曲线数学模型
目前运用最为广泛的仍为7段S型曲线,它把整个过程分为加加速、匀加速、减加速、匀速、加减速、匀减速、减减速这7个过程。它能够有效的保证加速度与速度的连续,但根据实际不同的路劲长度,可分成多种情况进行考虑,整体的数学模型就相对而言比较复杂,计算量也偏大。
在七段S曲线的基础上,为了简化模型,降低整体系统的计算量,文章提出了五段S曲线,其分为五个阶段:加加速、加减速、匀速、加减速、减减速。与七段S曲线相比,减少了匀加速和匀减速这两个过程,但其仍可以满足加速度a和速度v连续。设Vs为起始速度,Ve为终止速度,V为设定的最高速度,T1~T5为各个阶段的运行时间。
假设在T1,T2,T3,T5时间段内,加速度a的变化率J的值是恒定的。为了保证运行轨迹在起始位置与减加速末位置的加速度a均为0,应该保证加加速的时间与减加速的时间相同,即T1=T2,同理可得T4=T5,又由于加速度的变化率J恒定,可得T1=T2=T4=T5=Tm,这里的 Tm由起始速度Vs、最高速度V和加速度变化率J决定,进一步推导可得初始速度等于终止速度,即Vs=Ve。
利用加速度、速度、位移之间的积分关系可以推导出加速度a、速度v、位移s之间的积分关系可直接列出公式,只要确定了Tm和T3两个变量,就可以任意时刻的加速度、速度和位移,可以构造出完整的S曲线。相比于七段S曲线,该算法较简单,易于实现,但其计算过程中间参数较多,相对比较复杂。
3 五段S曲线加减速控制算法
S曲线的加减速可分为前加减速和后加减速,后加减速对各个坐标轴进行速度控制,不需要预测减速点,计算量较小,但会带来一定的位置误差;前加减速仅对合成速度进行控制,需要预测减速点,其计算量比较大,但可以保证位置的精度。为了保证系统的精度,文本采用前加减速控制的方式。
在实际过程中,根据路径S长短不同,可分为两种情况。
4 仿真及结果分析
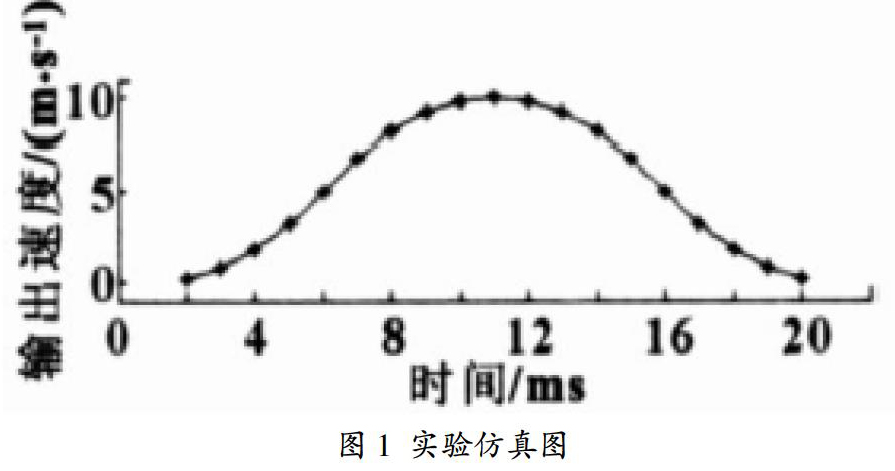
为了检验这种算法能否保证系统速度、加速度的连续性以及满足柔性加减速的要求,对上述加减速控制进行仿真验证。取a=2000mm/s2,T=1ms,Ve=Vs=0进行仿真,其结果图如图1所示。由图可知,当路径较短时,S曲线加减速控制新算法可使系统具有较高的柔性,减小了实际加工过程中的冲击,缩短了程序的运行时间,提高了机床运行的平稳性。
5 总结
这里给出了一种S曲线的控制策略,简化了其中间运算过程,提高了系统运行的实时性。经过仿真验证了其可行性,并且已经在实际项目中进行了运用。

上一篇 : 手轮脉冲控制板的设计方法介绍及 所遇问题的解决方案
下一篇 : 没有了
